
در دنیای دقیق اتوماسیون صنعتی، کنترل موقعیت، سرعت و جهت چرخش شفت موتورها بدون وجود یک سیستم فیدبک (Feedback) مطمئن، عملاً ناممکن است. انکودر (Encoder) به عنوان حیاتیترین حسگر یا ترنسدیوسر در این چرخه، وظیفهی تبدیل جابهجاییهای مکانیکی به سیگنالهای الکتریکی قابلفهم برای کنترلرها (مانند PLC، اینورتر یا HMI) را بر عهده دارد.
اهمیت این قطعه زمانی مشخص میشود که بدانیم در سیستمهای کنترل حلقه بسته (Closed-loop)، دقت نهایی ماشینآلات دقیقاً برابر با دقت انکودر به کار رفته در آنهاست. انتخاب اشتباه یا عدم شناخت صحیح این تجهیز، نه تنها منجر به خطای محاسباتی در پروسه تولید میشود، بلکه میتواند هزینههای سنگینی را به خطوط تولید تحمیل کند. در این مقاله از سایت گپ اتوماسیون، ضمن بررسی فنی عملکرد انکودرها، به تشریح دقیق انواع آن و پارامترهای حیاتی برای انتخاب یک مدل مناسب میپردازیم.
نحوه عملکرد انکودر؛ از حرکت تا پالس
به زبان فنی، انکودر یک مبدل الکترومکانیکی است. اساس کار این تجهیز بر خوانش تغییرات موقعیت (چه به صورت چرخشی و چه خطی) و ترجمه آن به کدهای دیجیتال یا سیگنالهای آنالوگ استوار است.
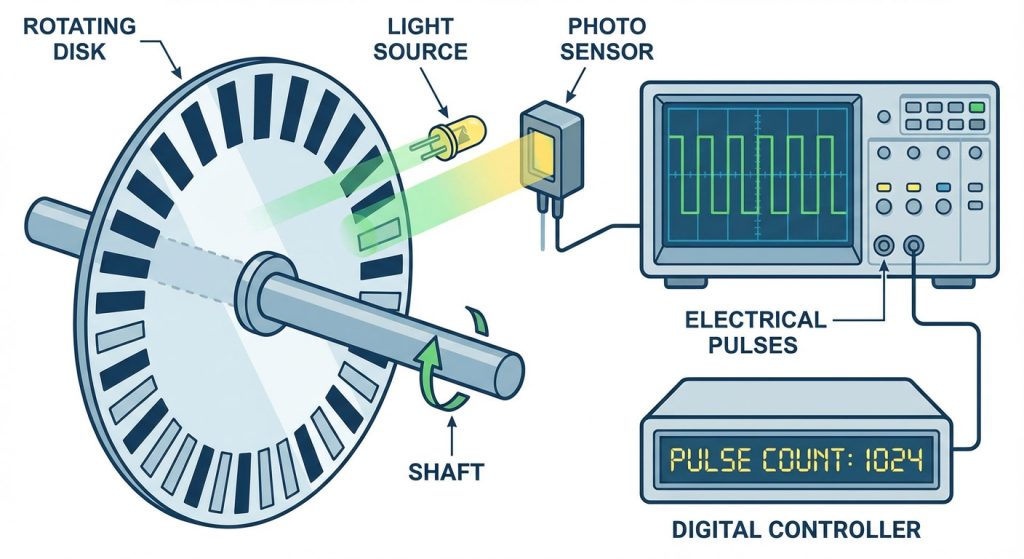
در رایجترین نوع انکودرها، یک دیسک مدرج (شامل شیارهای شفاف و کدر) به شفت متصل است که با چرخش آن، نور ارسالی از یک فرستنده قطع و وصل میشود. سنسور گیرنده در سمت دیگر، این قطع و وصل شدن نور را دریافت کرده و آن را به صورت موجهای مربعی یا پالسهای الکتریکی به خروجی میفرستد. کنترلر با شمارش این پالسها (Pulse Counting)، میتواند میزان دقیق جابهجایی، سرعت لحظهای و شتاب را محاسبه کند. هرچه تعداد این پالسها در یک دور چرخش بیشتر باشد، رزولوشن (Resolution) یا دقت دستگاه بالاتر خواهد بود.
انواع انکودر؛ دستهبندیهای استاندارد صنعتی
برای انتخاب صحیح انکودر در پروژههای اتوماسیون، صرفاً دانستن مدل شفت کافی نیست. این تجهیزات را باید از سه منظر کلیدی «نوع حرکت»، «تکنولوژی ساخت» و «پروتکل خروجی» مورد بررسی قرار داد. در ادامه به تحلیل فنی دو دستهبندی نخست میپردازیم.
۱. دستهبندی بر اساس نوع حرکت (Motion Type)
- انکودر چرخشی یا دوار (Rotary Encoder): این مدل پرکاربردترین نوع در صنعت است که مستقیماً به شفت الکتروموتور یا مکانیزم متصل میشود. وظیفه اصلی آن تبدیل موقعیت زاویهای یا حرکت دورانی شفت به کد دیجیتال است. از این مدل برای کنترل سرعت اسپیندلها، موقعیتدهی میزهای گردان و فیدبک موتورهای AC/DC استفاده میشود.
- انکودر خطی (Linear Encoder): این تجهیز که در بازار صنعتی ایران غالباً با نام «خطکش دیجیتال» یا خطکش اهمی/نوری شناخته میشود، برای اندازهگیری جابهجایی در یک مسیر مستقیم طراحی شده است. بر خلاف مدلهای دوار، سنسور روی یک مقیاس خطی حرکت میکند. کاربرد اصلی آن در محورهای دستگاههای CNC، دستگاههای پرس و سیستمهای گنتری است که نیاز به دقت میکرونی در طول حرکت دارند.
۲. دستهبندی بر اساس تکنولوژی سنسینگ (Sensing Technology)
بسیاری از خرابیهای انکودر ناشی از انتخاب غلط تکنولوژی ساخت نسبت به محیط کارخانه است:
- انکودر نوری (Optical): این مدلها استاندارد طلایی دقت در صنعت هستند. مکانیزم آنها بر پایه عبور نور از یک دیسک شیشهای یا فلزی شیاردار استوار است. انکودرهای نوری بالاترین رزولوشن و دقت را ارائه میدهند، اما پاشنه آشیل آنها حساسیت به محیط است. نفوذ گرد و غبار، بخارات روغن یا لرزشهای شدید میتواند باعث اختلال در خوانش نوری یا شکستن دیسک شیشه ای شود.
- انکودر مغناطیسی (Magnetic): این مدلها از تغییرات میدان مغناطیسی و سنسورهای اثر هال (Hall Effect) برای تشخیص حرکت استفاده میکنند. اگرچه ممکن است رزولوشن نهایی آنها کمی پایینتر از مدلهای نوری پیشرفته باشد، اما ساختار مکانیکی بسیار مقاومتری دارند. انکودرهای مغناطیسی بهترین گزینه برای صنایع سنگین (مانند فولاد، سیمان و معدن) هستند که تجهیزات در معرض آلودگی شدید و شوکهای مکانیکی قرار دارند.
۳.انکودر افزایشی در برابر مطلق (Incremental vs. Absolute)
حیاتیترین دستهبندی برای مهندسین اتوماسیون، تفاوت در نحوه گزارشدهی موقعیت است. انتخاب بین این دو مدل، مستقیماً روی استراتژی کنترل سیستم و برنامهنویسی PLC تاثیر میگذارد.
انکودر افزایشی (Incremental Encoder)
این نوع انکودر، پرمصرفترین و مقرونبهصرفهترین گزینه در بازار است. انکودر افزایشی صرفاً تغییرات حرکت را گزارش میدهد، نه موقعیت مطلق را.
- عملکرد: خروجی این سنسورها معمولاً شامل سه کانال اصلی A، B و Z است. با مقایسه اختلاف فاز بین پالسهای کانال A و B، جهت چرخش (ساعتگرد یا پادساعتگرد) تشخیص داده میشود و کانال Z نیز در هر دور کامل، یکبار پالس میدهد (به عنوان رفرنس).
- نقطه ضعف کلیدی (نیاز به Homing): بزرگترین چالش انکودر افزایشی این است که با قطع جریان برق، موقعیت فعلی از حافظه پاک میشود. پس از وصل مجدد برق، دستگاه نمیداند شفت در چه زاویهای قرار دارد و حتماً باید عملیات «نقطه صفر» یا Homing انجام شود تا ماشین موقعیت خود را بازیابی کند.
انکودر مطلق (Absolute Encoder)
در کاربردهایی که امنیت و تداوم موقعیت حیاتی است (مانند بازوهای رباتیک یا جرثقیلهای سقفی)، از انکودر ابسولوت استفاده میشود.
- ویژگی متمایز: برخلاف مدل افزایشی که پالس تولید میکند، انکودر مطلق برای هر زاویه خاص از چرخش شفت، یک «کد دیجیتال منحصربهفرد» (معمولاً به صورت باینری یا گری کد) دارد.
- مزیت استراتژیک: با قطع برق و جابهجا شدن شفت (حتی با دست)، پس از روشن شدن مجدد، سیستم دقیقاً میداند شفت کجاست. این ویژگی نیاز به سنسورهای اضافی برای Homing و زمان تلفشده برای کالیبراسیون اولیه را کاملاً حذف میکند.
انواع انکودر مطلق:
- سینگل ترن (Single-turn): موقعیت را فقط در یک دور کامل (۰ تا ۳۶۰ درجه) تشخیص میدهد و با تکمیل دور، شمارش از صفر شروع میشود.
- مولتی ترن (Multi-turn): علاوه بر زاویه در یک دور، توانایی شمارش “تعداد دورهای کامل” را نیز دارد. این مدل برای محورهایی که در طول کارکرد هزاران دور میچرخند (مانند محور Z دستگاه CNC) الزامی است.
تحلیل سیگنالهای خروجی و درایورها (Output Circuits)
یکی از شایعترین دلایل عدم تطابق انکودر با کارتهای ورودی (PLC High Speed Inputs) یا درایو موتور، عدم توجه به نوع مدار خروجی است. ولتاژ تغذیه و سطح ولتاژ سیگنالهای A و B باید دقیقاً با مشخصات کنترلر شما همخوانی داشته باشد.
۱. خروجی لاین درایور (TTL / RS-422)
این نوع خروجی که با نام TTL (Transistor-Transistor Logic) نیز شناخته میشود، معمولاً با ولتاژ تغذیه ۵ ولت کار میکند.
- ویژگی فنی: در خروجی لاین درایور، برای هر کانال (مثلاً A)، سیگنال معکوس آن (A Not) نیز ارسال میشود. این ساختار دیفرانسیلی باعث میشود نویزهای الکترومغناطیسی محیط (EMC) روی کابلها خنثی شوند.
- کاربرد: بهترین گزینه برای مسیرهای کابلکشی طولانی و محیطهای پرنویز است. اکثر سرو درایوها و کارتهای کنترل حرکت دقیق از این استاندارد پشتیبانی میکنند.
۲. خروجی پوش-پول (HTL / Push-Pull)
این استاندارد که با نام HTL شناخته میشود، معمولاً در رنج ولتاژ ۱۰ تا ۳۰ ولت DC (غالباً ۲۴ ولت صنعتی) عمل میکند.
- ویژگی فنی: مدار داخلی این مدلها ترکیبی از ترانزیستورهای NPN و PNP است که امکان جریاندهی (Sourcing) و جریانکشی (Sinking) را فراهم میکند.
- کاربرد: به دلیل سازگاری با سطح ولتاژ ۲۴ ولت، این مدلها مستقیماً به ورودیهای دیجیتال اکثر PLCهای زیمنس، دلتا و فتک متصل میشوند و نیازی به کارتهای واسط خاص ندارند. محبوبترین مدل برای کاربردهای عمومی اتوماسیون است.
۳. خروجی Open Collector (NPN/PNP)
این مدل قدیمیتر و سادهتر است و بیشتر در سیستمهایی استفاده میشود که سطح ولتاژ انکودر و کنترلر متفاوت است. در نوع NPN (Open Collector)، خروجی صرفاً زمین (GND) را سوئیچ میکند و برای اتصال به کنترلر، نیاز به یک مقاومت پولآپ (Pull-up) خارجی دارد. امروزه استفاده از مدلهای Push-Pull به دلیل انعطاف بیشتر، جایگزین این مدل شده است، اما همچنان در برخی دستگاههای قدیمی آسیایی دیده میشود.
۷ پارامتر طلایی برای انتخاب و خرید انکودر (Buying Guide)
انتخاب انکودر مناسب فقط به برند آن محدود نمیشود. برای اینکه در هنگام نصب یا راهاندازی با مشکل مواجه نشوید و هزینهی اضافی بابت مرجوعی کالا نپردازید، حتماً پیش از تماس با واحد فروش گپ اتوماسیون، این ۷ پارامتر را بررسی کنید:
- نوع انکودر (Type): آیا به مدل افزایشی (Incremental) نیاز دارید یا مطلق (Absolute)؟ اگر مطلق است، تک دور یا چند دور؟
- رزولوشن (Resolution/PPR): دقت مورد نیاز شما چقدر است؟ (مثلاً ۱۰۲۴ پالس، ۲۵۰۰ پالس یا بیشتر). دقت کنید که رزولوشن خیلی بالا بدون دلیل فنی، فقط بار پردازشی PLC را زیاد میکند.
- قطر شفت و بدنه: آیا انکودر شما شفت دار (Shaft) است یا هالو شفت (Hollow Shaft)؟ قطر شفت (مثلاً ۶، ۸ یا ۱۰ میلیمتر) باید دقیقاً با کوپلینگ یا شفت موتور همخوانی داشته باشد.
- ولتاژ تغذیه: سیستم شما ۵ ولت (VDC) است یا ۱۰ تا ۳۰ ولت؟ اتصال اشتباه ولتاژ بلافاصله باعث سوختن مدار داخلی انکودر میشود.
- نوع خروجی: کنترلر شما (PLC یا درایو) چه نوع سیگنالی را میپذیرد؟ (Line Driver, Push-Pull, Open Collector).
- نوع اتصال: آیا به کانکتور (سوکت) نیاز دارید یا کابل متصل؟ طول کابل استاندارد چقدر باید باشد؟
- درجه حفاظت (IP Code): اگر محیط کارگاه شما دارای گرد و غبار، رطوبت یا پاشش آب است، حتماً به IP54 یا IP65 بودن بدنه انکودر توجه کنید.
کاربردهای عملیاتی انکودر در صنایع مادر
شاید بپرسید دقیقاً در کجای خط تولید به این تجهیز نیاز داریم؟ تقریباً هر جایی که نیاز به “حرکت دقیق” باشد، ردپای انکودر دیده میشود:
- دستگاههای CNC و ماشینابزار: در محورهای X، Y و Z برای فیدبک دقیق موقعیت به کنترلر و همچنین در اسپیندل موتور برای کنترل سرعت و جهت چرخش (Tapping) از انکودرهای رزولوشن بالا استفاده میشود.
- خطوط بستهبندی و نوار نقاله (Conveyors): برای همگامسازی (Synchronization) سرعت نوار با سرعت دستگاه پرکن یا لیبلزن، و همچنین در سیستمهای “برش در طول” (Cut-to-length) برای اندازه گیری متراژ دقیق محصول.
- صنعت آسانسور و بالابر: انکودرهای نصب شده روی موتور گیربکس آسانسور، وظیفه نرم کردن حرکت (Soft Start/Stop) و تراز دقیق کابین در طبقات (Leveling) را بر عهده دارند.
- رباتیک صنعتی: در مفاصل بازوهای رباتیک، از انکودرهای ابسولوت استفاده میشود تا ربات حتی پس از قطع برق، موقعیت دقیق خود را گم نکند و نیاز به کالیبراسیون مجدد نداشته باشد.
نتیجهگیری؛ انکودر، چشم بینای سیستم اتوماسیون شماست
همانطور که در این مقاله بررسی کردیم، انکودرها صرفاً یک قطعه جانبی نیستند؛ بلکه حکم “چشم” سیستم کنترلی را دارند. انتخاب یک انکودر با کیفیت و متناسب با نیاز پروژه، تضمینکننده دقت محصول نهایی و جلوگیری از توقفهای ناگهانی خط تولید است.
اگر در انتخاب بین مدلهای نوری یا مغناطیسی تردید دارید، یا برای جایگزینی انکودر قدیمی دستگاه خود به دنبال معادل دقیق با همان مشخصات فنی هستید، کارشناسان فنی ما در کنار شما هستند.
مشاوره تخصصی و خرید انواع انکودر از گپ اتوماسیون
مجموعه گپ اتوماسیون با سالها تجربه در تأمین قطعات اتوماسیون صنعتی، طیف وسیعی از انکودرهای چرخشی، خطی، افزایشی و ابسولوت را از معتبرترین برندهای جهانی با ضمانت اصالت کالا ارائه میدهد.
💡 خدمات ما شامل:
- مشاوره فنی رایگان جهت انتخاب بهترین مدل (Selection).
- تامین انواع انکودر با خروجیهای HTL، TTL و Open Collector.
- ارائه راهکارهای جایگزین برای مدلهای توقف تولید شده.
📞 همین حالا برای استعلام قیمت و دریافت مشاوره فنی با ما تماس بگیرید.